

")
")
")
Návrh řešení HW ver.2.0
Po asi dvouměsíčních zkušenostech s provozem mé ovládací jednotky k pozicionéru EGIS jsem rozšířil původní požadavky o další vlastnosti. Tím začala vznikat nová verze HW 2.0. Tato verze nebude kompatibilní s HW ver.1.0. Důvodem je to, že nové funkce vyžadují připojení k Raspberry Pi na pinech GPIO portu, které už byly použity na něco jiného. Proto jsem vývoj HW verze 1.0 ukončil a to, co bude nadále vznikat, postupně nahradí všechno, co jsem zde doposud publikoval. Protože je mi ale líto už vynaloženou práci jen tak vyhodit, přesunu ji postupně do archívu. Tam bude k dispozici pro všechny, kteří by se k ní chtěli vrátit a prohlížet si ji.
Pro novou ovládací jednotku jsem si tedy stanovil tyto rozšířené požadavky:
- Ovládat oba motory azimutu a elevace současně
- U obou motorů umožnit PWM regulaci otáček pro plynulý rozjezd a zastavení
- Doplnit konstrukci o ovládání servomotoru pro nastavení skew LNB
- Zajistit správnou funkci řídící jednotky i v případě propojení s pozicionérem EGIS kabely dlouhými 10 m
- Celou řídící jednotku ovládat přes ethernet, buďto kabelem nebo přes Wi-Fi
- Do elektroniky motorů nezasahovat.
Zásadním důvodem pro změnu konstrukce byla vysoká rychlost obou motorů EGIS. Po připojení 24V pomocí relé se motory rozběhly příliš rychle. Tím vznikl velký dynamický ráz na celou parabolu a její součásti. Tento ráz se díky rozhoupání paraboly zpětně přenášel na mechanické součásti pozicionéru EGIS. Proto jsem měl oprávněnou obavu o to, že uvedené opakované rázy sníží životnost jak pozicionéru EGIS, tak i celé rozměrné paraboly.
Nepříjemná zkušenost se zničením první verze řídící jednotky ukázala, že ochrana elektroniky před vzdušnou vlhkostí není úplně jednoduchá záležitost. Proto jsem se rozhodl vyzkoušet propojení nové řídící jednotky s pozicionérem EGIS pomocí 10 m dlouhých kabelů. To by mohlo umožnit případné umístění na stanoviště kryté před přímými povětrnostními vlivy.
Dalším zcela nezbytným doplňkem dvoumotorového otáčení parabolou je možnost nastavovat skew pro LNB s lineární polarizací. To už pochopitelně nesouvisí s konstrukcí pozicionéru EGIS, musí se vytvořit samostatná jednotka natáčení LNB. Ale její ovládání logicky souvisí se směrováním paraboly a proto by tato přídavná jednotka měla být ovládaná stejným programem. Ukázalo se, že lze koupit relativně malý, ale výkonný modelářský servomotor, který se výborně hodí ke konstrukci natáčení LNB. Proto jsem do HW ver.2.0 doplnil i jeho podporu.
Řídící jednotkou zůstává můj oblíbený počítač Raspberry Pi 3. Starší verze nejde použít kvůli malému počtu HW kanálů PWM a řízení serva. HW řízení by se dalo nahradit softwarovým ovládáním, ale vzhledem k tomu, že operační systém linux Raspbian není typu realtime, bylo by obtížné v amatérských podmínkách prověřit, zda výkon starších typů Raspberry Pi je dostatečný k plynulé SW regulaci ovládaných motorů.
Dalším konstrukčním blokem zůstává zdroj 24V/75W typ MEAN WELL LRS-75-24. Jeho rozměry jsou 99x97x30mm. Je schopen dodat téměř dvojnásobek výkonu potřebného pro souběžný chod obou motorů. Má vnitřní ochrany pro přetížení, přepětí v síti a přehřátí. Protože existuje i verze 36V/100W MEAN WELL LRS-100-36, uvažuji o možnosti souběžného vývoje další verze HW 2.0A pro ovládání běžných táhlových motorů. Rozdíl mezi oběma verzemi by byla kromě typu zdroje jen ve vstupní odporové síti nastavující optimální proud LED diodami oddělovacích optočlenů. Až otestuji prototypy, možná se ukáže, že půjde vybrat jedno společné kompromisní řešení pro napájení 24V i 36 V. Zatím ale předpokládám, že rozdíl napětí je příliš velký a odporové sítě budou muset být rozdílné.

Obr. 2 - Modul spínaného zdroje MEAN WELL LRS-75-24
Z principu PWM řízení otáček stejnosměrných motorů je jasné, že relé použitá v HW ver.1.0 musí být nahrazena polovodičovými spínacími prvky. Zde je těžké rozhodnout, jaký výkon by měly být schopny spínat. Zda se soustředit jen na spotřebu motorů pozicionéru EGIS, nebo volit rovnou větší výkonovou rezervu pro případné experimenty s motory a konstrukcemi jiných typů. Vzhledem k nutnosti chlazení polovodičových spínacích prvků obzvláště v letním období jsem se rozhodl nezkoušet nic extrémního. Nejsem inženýr, který by si dokázal na papíře spočítat potřebné rozměry chladících bloků. Má volba bude spíš experimentální. Proto jsem se držel při zemi. Nakonec jsem vybral obvod L6203 obsahující kompletní výkonový spínací můstek s tranzistory DMOS. Dokáže spínat napětí až 48 V a proud do 5A. To by mělo s rezervou stačit na to, aby nedocházelo k jeho velkému zahřívání.
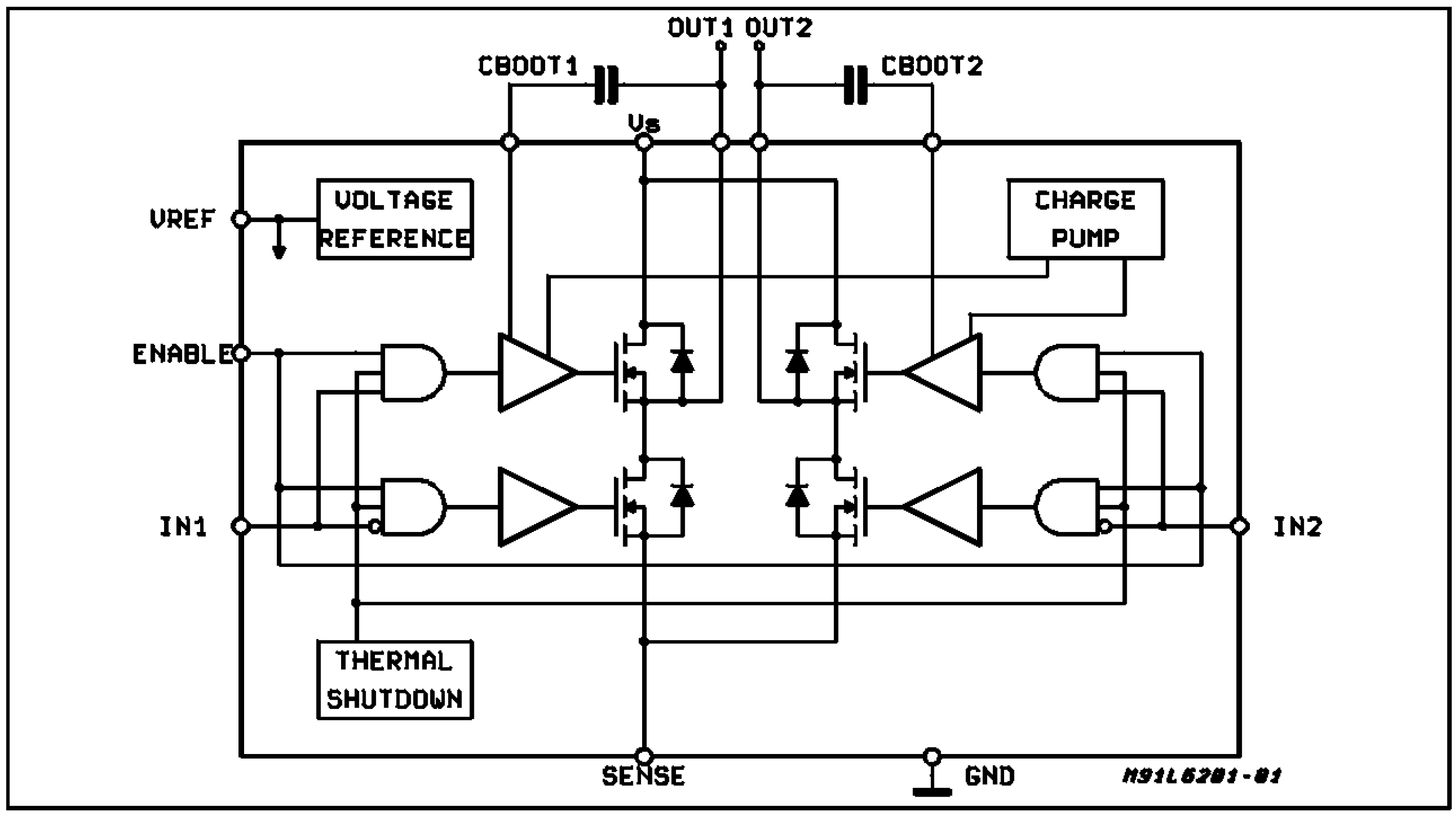
Obr. 3 - Blokové schéma můstkového budiče L6203
Jako servomotor pro pohon otáčení LNB jsem zvolil MG996R. Jednak obsahuje kovové převody a dále má krouticí moment 15 kg / cm při 6V. To by mělo zajistit dostatečný výkon a spolehlivost, i když o konkrétním řešení jednotky pro nastavení skew zatím nemám žádnou představu.

Tak to je zhruba moje současná představa o nové konstrukci ovládací jednotky. Pokud by jste k ní měli nějaké drobné rady, dotazy nebo připomínky, napište je do komentáře na konci článku. Pokud by jste se chtěli pustit do rozsáhlejší diskuze, zkuste diskuzní fórum tady.