

")
")
")
HW version 2.0 Lösungsdesign
Nach ungefähr zwei Monaten Erfahrung mit dem Betrieb meiner Steuereinheit für den EGIS-Stellungsregler habe ich die ursprünglichen Anforderungen um zusätzliche Funktionen erweitert. Damit wurde eine neue Version von HW 2.0 gestartet. Diese Version ist nicht kompatibel mit HW Version 1.0. Dies liegt daran, dass für die neuen Funktionen eine Verbindung zum Raspberry Pi an den GPIO-Port-Pins erforderlich ist, die bereits für andere Zwecke verwendet wurden. Aus diesem Grund habe ich die Entwicklung von HW Version 1.0 gestoppt und was weiterhin erstellt wird, wird nach und nach alles ersetzen, was ich bisher hier veröffentlicht habe. Aber da es mir leid tut, die bereits geleistete Arbeit einfach wegzuwerfen, werde ich sie schrittweise in das Archiv verschieben. Dort steht es jedem zur Verfügung, der dorthin zurückkehren und es ansehen möchte.
Deshalb habe ich diese erweiterten Anforderungen für das neue Steuergerät festgelegt:
- Steuern Sie gleichzeitig Azimut- und Elevationsmotoren
- Aktivieren Sie für beide Motoren die PWM-Drehzahlregelung für ein reibungsloses Starten und Stoppen
- Vervollständigen Sie das Design mit einer Servomotorsteuerung zum Einstellen des LNB-Versatzes
- Stellen Sie die korrekte Funktion des Steuergeräts auch bei Anschluss an den EGIS-Stellungsregler mit 10 m langen Kabeln sicher
- Steuern Sie die gesamte Steuereinheit über Ethernet, entweder über Kabel oder über WLAN
- Die Elektronik der Motoren nicht stören.
Der Hauptgrund für die Konstruktionsänderung war die hohe Drehzahl beider EGIS-Motoren. Nach dem Anschließen von 24 V über ein Relais starteten die Motoren zu schnell. Dies erzeugte eine große dynamische Wirkung auf das gesamte Gericht und seine Komponenten. Dieser Stoß wurde aufgrund des Schaukels der Schale auf die mechanischen Komponenten des EGIS-Positionierers zurück übertragen. Daher hatte ich berechtigte Bedenken, dass diese wiederholten Erschütterungen die Lebensdauer sowohl des EGIS-Stellungsreglers als auch der gesamten großen Schüssel verkürzen würden.
Unangenehme Erfahrungen mit der Zerstörung der ersten Version des Steuergeräts haben gezeigt, dass der Schutz der Elektronik vor Luftfeuchtigkeit keine einfache Angelegenheit ist. Aus diesem Grund habe ich beschlossen, die neue Steuereinheit mit 10 m langen Kabeln an den EGIS-Positionierer anzuschließen. Dies könnte eine mögliche Unterbringung in einem Lebensraum ermöglichen, der vor direkten Wetterbedingungen geschützt ist.
Eine weitere absolut notwendige Ergänzung zur zweimotorigen Drehung der Schale ist die Möglichkeit, den Versatz für LNBs mit linearer Polarisation einzustellen. Dies hängt natürlich nicht mehr mit dem Aufbau des EGIS-Positionierers zusammen, sondern es muss eine separate LNB-Aufzeichnungseinheit erstellt werden. Die Steuerung hängt jedoch logisch mit der Führung der Schüssel zusammen, und daher sollte diese zusätzliche Einheit von demselben Programm gesteuert werden. Es stellte sich heraus, dass Sie einen relativ kleinen, aber leistungsstarken Servomotor kaufen können, der sich hervorragend für das Design von LNB-Aufnahmen eignet. Deshalb habe ich seine Unterstützung zu HW Version 2.0 hinzugefügt.
Die Steuereinheit bleibt mein Lieblingscomputer Raspberry Pi 3. Ältere Versionen können aufgrund der geringen Anzahl von PWM- und Servosteuerungen für HW-Kanäle nicht verwendet werden. Die HW-Steuerung könnte durch eine Softwaresteuerung ersetzt werden. Da das Linux-Raspbian-Betriebssystem jedoch nicht in Echtzeit ausgeführt wird, ist es unter Amateurbedingungen schwierig zu überprüfen, ob die Leistung älterer Raspberry Pi-Typen für eine reibungslose SW-Steuerung von gesteuerten Motoren ausreicht.
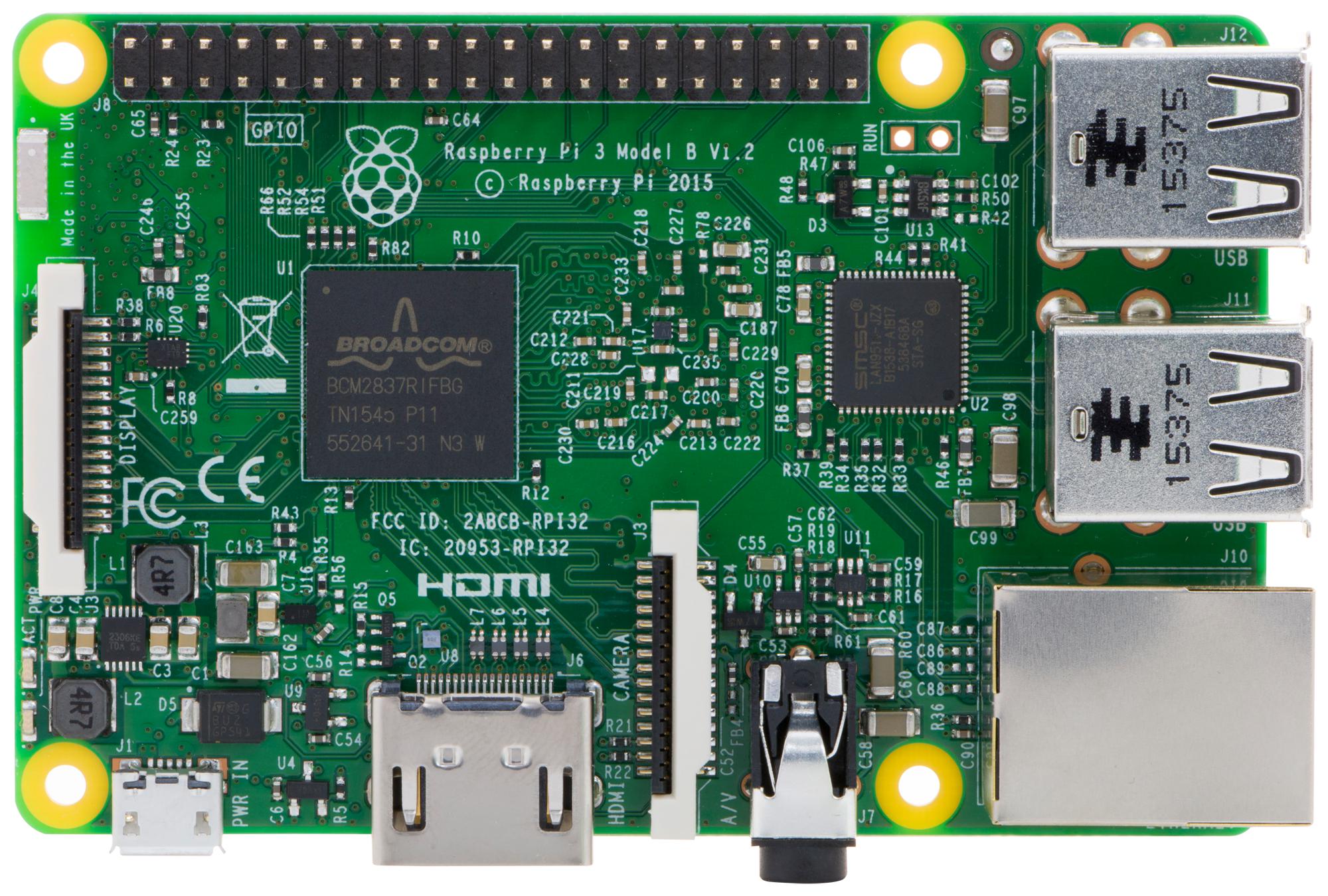
Abb. 1 - Computer Raspberry Pi 3
Ein weiterer Baustein bleibt das 24V / 75W Netzteil vom Typ MEAN WELL LRS-75-24. Seine Abmessungen betragen 99x97x30mm. Es ist in der Lage, fast die doppelte Leistung zu liefern, die erforderlich ist, um beide Motoren gleichzeitig zu betreiben. Es verfügt über einen internen Schutz gegen Überlastung, Netzüberspannung und Überhitzung. Da es auch eine 36V / 100W MEAN WELL LRS-100-36-Version gibt, erwäge ich die Möglichkeit der gleichzeitigen Entwicklung einer anderen Version von HW 2.0A zur Steuerung herkömmlicher Fahrmotoren. Der Unterschied zwischen den beiden Versionen würde zusätzlich zur Art der Quelle nur darin bestehen, dass im Eingangswiderstandsnetzwerk der optimale Strom durch die LEDs der isolierenden Optokoppler eingestellt wird. Wenn ich die Prototypen teste, kann sich herausstellen, dass es möglich ist, eine gemeinsame Kompromisslösung für die 24-V- und 36-V-Stromversorgung zu wählen. Im Moment gehe ich jedoch davon aus, dass die Spannungsdifferenz zu groß ist und die Widerstandsnetzwerke unterschiedlich sein müssen.

Abb. 2 - Schaltnetzteil MEAN WELL LRS-75-24
Aus dem Prinzip der PWM-Drehzahlregelung von Gleichstrommotoren geht hervor, dass die in HW Version 1.0 verwendeten Relais durch Halbleiterschaltelemente ersetzt werden müssen. Hier ist es schwierig zu entscheiden, welche Leistung sie schalten können sollen. Ob Sie sich nur auf den Verbrauch der EGIS-Positionierermotoren konzentrieren oder eine noch größere Gangreserve für mögliche Experimente mit Motoren und Strukturen anderer Typen wählen. Aufgrund der Notwendigkeit, Halbleiterschaltelemente zu kühlen, insbesondere im Sommer, habe ich beschlossen, nichts Extremes auszuprobieren. Ich bin kein Ingenieur, der die notwendigen Abmessungen von Kühlblöcken auf Papier berechnen kann. Meine Wahl wird experimenteller sein. Deshalb bin ich am Boden geblieben. Schließlich entschied ich mich für die L6203-Schaltung, die eine komplette Leistungsschaltbrücke mit DMOS-Transistoren enthält. Es kann Spannungen bis zu 48 V und Ströme bis zu 5A schalten. Dies sollte mit Vorsicht ausreichen, um eine Überhitzung zu vermeiden.
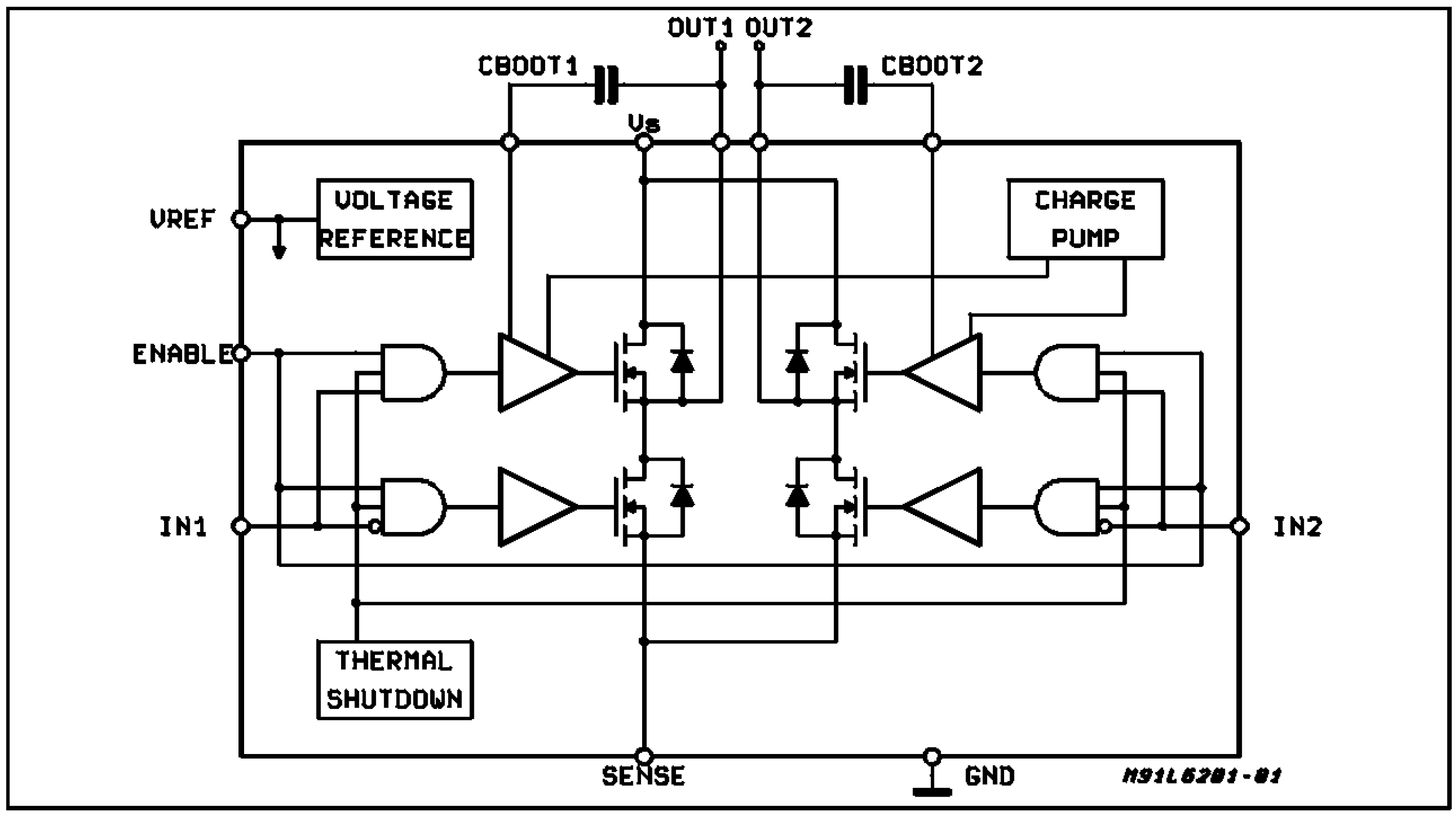
Abb. 3 - Blockschaltbild des Brückentreibers L6203
Ich habe den MG996R als Servomotor für den LNB-Rotationsantrieb gewählt. Zum einen enthält es Metallzahnräder und zum anderen hat es ein Drehmoment von 15 kg / cm bei 6V. Dies sollte eine ausreichende Leistung und Zuverlässigkeit gewährleisten, obwohl ich noch keine Ahnung von einer bestimmten Lösung für die Einstellung des Versatzes habe.

Das ist ungefähr meine derzeitige Vorstellung von einem neuen Steuergerätedesign. Wenn Sie kleine Ratschläge, Fragen oder Kommentare dazu haben, schreiben Sie diese in die Kommentare am Ende des Artikels. Wenn Sie eine breitere Diskussion beginnen möchten, Probieren Sie das Diskussionsforum hier aus.