

")
")
")
HW-Version 2.1 Lösungsdesign
Mit der Zeit stellte sich heraus, was ich am Anfang vermutete. Meine neue Steuereinheit wird nicht nur ein Ersatz für die originale EPS-103 sein. Der Satellitenempfang erfordert viel mehr zu steuernde Geräte als nur zwei Motoren zum Einstellen von Azimut und Höhe. Zuerst plante ich, eine einzelne Servosteuerung hinzuzufügen, um den SKEW einzustellen. Aber dann begann das Projekt ein wenig zu wachsen.
Basis ist nach wie vor der Raspberry Pi Computer. Ich verwende das Modell 3 B. Ältere RasPis haben keine ausreichende HW-Ausstattung. Den RasPi4 habe ich noch nicht in Erwägung gezogen. Aber sein Einsatz wird sicherlich möglich sein.
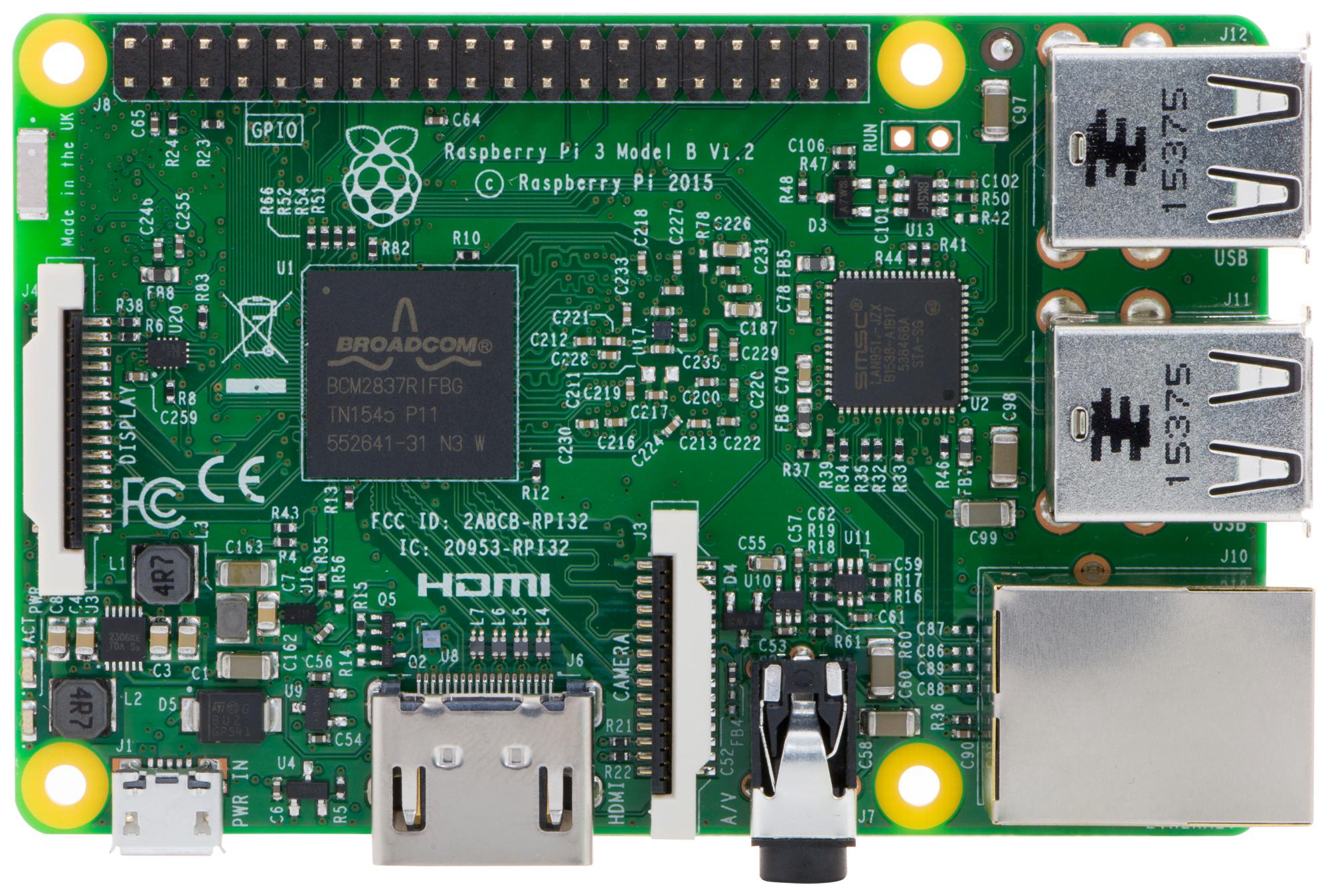
Auch die Ressource bleibt die gleiche wie in der HW-Version 1.0 oder 2.0. Es hat eine ausreichende Leistung und einen wichtigen Schadensschutz. Ich benutze es seit dem zweiten Jahr und es hat sich bewährt.

Abb. 2 - Schaltnetzteil MEAN WELL LRS-75-24
Die erste Neuerung gegenüber der HW-Version 2.0 ist die Ansteuerung eines kleinen DC-Getriebemotors. Ich habe es in diesem Shop www.dcmotory.cz gefunden und es hat interessante Eigenschaften.
| Bezeichnung: | PG320-24-264-BE |
| Versorgungsspannung: | 24V DC |
| Übertragung: | 1:264 |
| Lager: | Kugel, Metall |
| Rotationssensor: | Hall-Sonde 2x |
Der Motor scheint ideal zu sein, um ein ganzes LNB-Aufnahmesystem zu erstellen - SKEW-Einstellung. Seine Steuerung kann völlig identisch mit der Steuerung von EGIS-Hauptmaschinen sein. Das heißt, Geschwindigkeitssteuerung durch PWM-Modulation unter Verwendung der L6203-Schaltung. Es ist unnötig stark, aber zumindest wird es nicht zu heiß. Das Bewegungsfeedback wird von zwei Hall-Sonden geliefert.
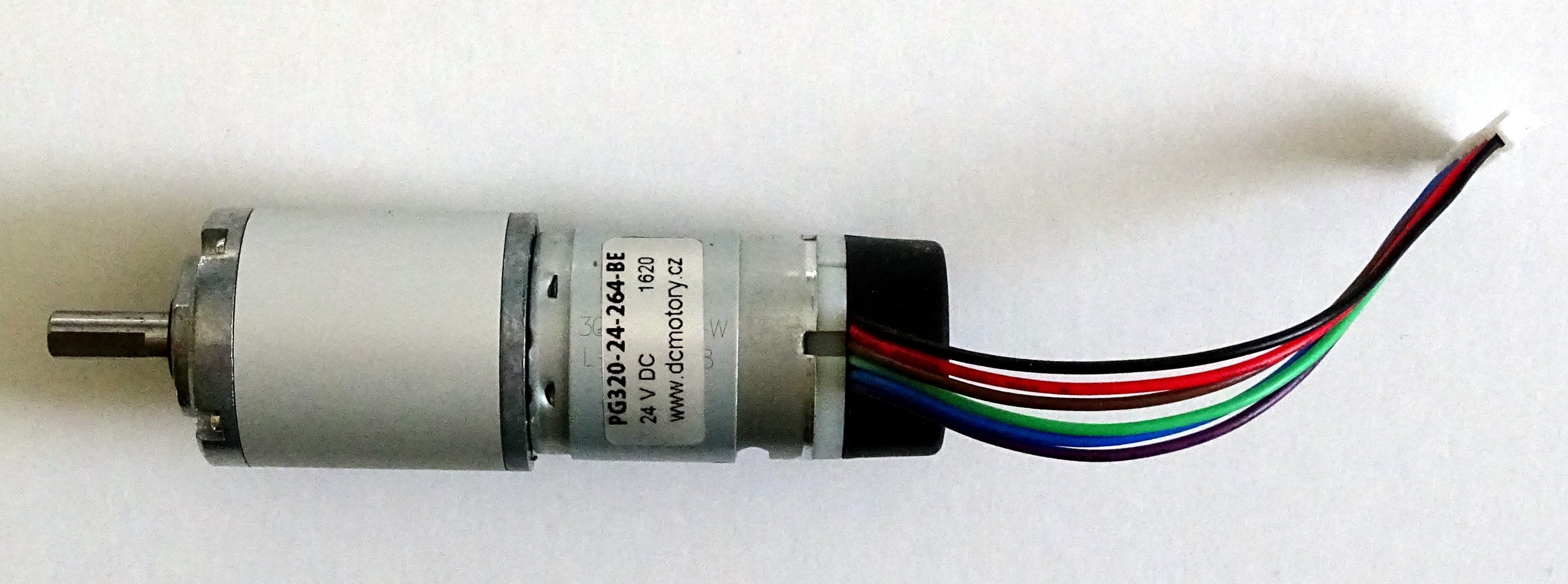
Abb. 3 - Motor PG320-24-264-BE
Eine weitere Neuheit ist die Ansteuerung des zweiten Stellmotors. Da der Einsatz von Servomotoren in der Satellitentechnik recht weit verbreitet ist, können zwei Servomotorschnittstellen sinnvoll sein. Im ursprünglichen HW.2.0-Build habe ich überlegt, die MG996R-Modellierungs-Engine zu verwenden, um die Schräglage anzupassen. Aber auch der Corotor Chaparral oder der Polarizer Hirschmann CSP 1210 C verwenden beispielsweise einen Servomotor.

Abb. 4 - Servoangetriebene Teile
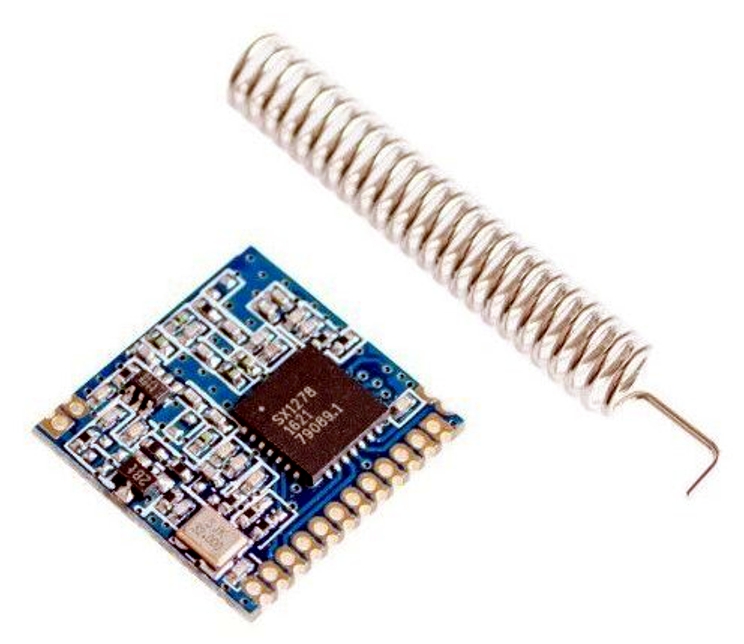
Es stellt sich heraus, dass dieses Projekt in Zukunft weiter ausgebaut werden könnte. Um dies vorzubereiten, habe ich beschlossen, einige Busse vom 40-Pin-Anschluss des RasPi auf separate Terminals zu leiten. Weitere Peripheriegeräte können auf Wunsch einfach angeschlossen werden. Zum Beispiel Wetterstationssensoren. Besitzer großer Schüsseln interessiert sicherlich, wie stark der Wind in unmittelbarer Nähe ihrer Schüssel weht und aus welcher Richtung. Es gibt sicher noch mehr solcher Accessoires. Und die Übertragung dieser Daten an den RasPi könnte beispielsweise ein 433MHz-Modul sein, das an den SPI-Bus angeschlossen ist. Auch die Nutzung des I2C-Busses ist sicher zu finden.
Aber das ist wirklich weit in der Zukunft. Kommen wir also endlich zur Sache.