

")
")
")
A co Superjack? HW verze 1.0 pro dva táhlové motory
Když jsem se pustil do úprav pozicionéru EGIS, bylo mou hlavní motivací zprovoznit zařízení, do kterého jsem investoval poměrně hodně peněz. Postupně se začalo ukazovat, že přebudováním ovládací elektroniky by se mohla dost významně navýšit užitná hodnota celého kompletu. Přesto jsem si byl vědom toho, že majitelů podobného zařízení nebude mnoho a tak se o mou rekonstrukci budou lidé zajímat spíš jen ze zvědavosti. Budou mé snažení brát jako raritu.
Když jsem ale zprovoznil prototyp HW 1.0 a začal jsem s testováním, napadla mě možnost dalšího experimentování. Celý EGIS pozicionér jsou vlastně jen dva obyčejné stejnosměrné motory, které mají snímač otáček ve formě impulzů. To všechno je sice schované v pěkné malé skříni, ale kromě mechanických převodů tam už nic víc není.
Táhlový motor je poháněn také stejnosměrným motorem. A také má snímač otáček ve formě impulzů. Nedalo by se to moje zařízení použít i k ovládání dvou táhlových motorů? Táhlové motory nejsou tak drahé a nemálo příznivců nejen satelitní techniky je opravdu prakticky využívá. Ať už klasickým otáčením ve směrech azimut / elevace, nebo k otáčení polarmountu a dorovnání odchylky elevace. Tím by se značně rozšířil okruh lidí, pro které by můj vývoj mohl mít praktický užitek. Byť třeba jen ve formě inspirace. Proto zkusím tuto myšlenku trochu teoreticky rozvést.
První táhlový motor by sloužil pro hlavní otáčení horizontálním směrem (nebo polarmountu). Vývody motoru přijdou připojit na výstupní svorky 17, 18 - AZ motor. Jeho snímač impulzů přijde připojit na vstupní svorky 07 - AZ Phase A (nebo 05 - AZ Phase B) a zemní svorku 12 - COM. Druhý táhlový motor bude sloužit k nastavení elevace. Vývody motoru přijdou připojit na výstupní svorky 15, 16 - EL motor. Jeho snímač impulzů přijde připojit na vstupní svorky 01 - EL Phase A (nebo 03 - EL Phase B) a zemní svorku 12 - COM.
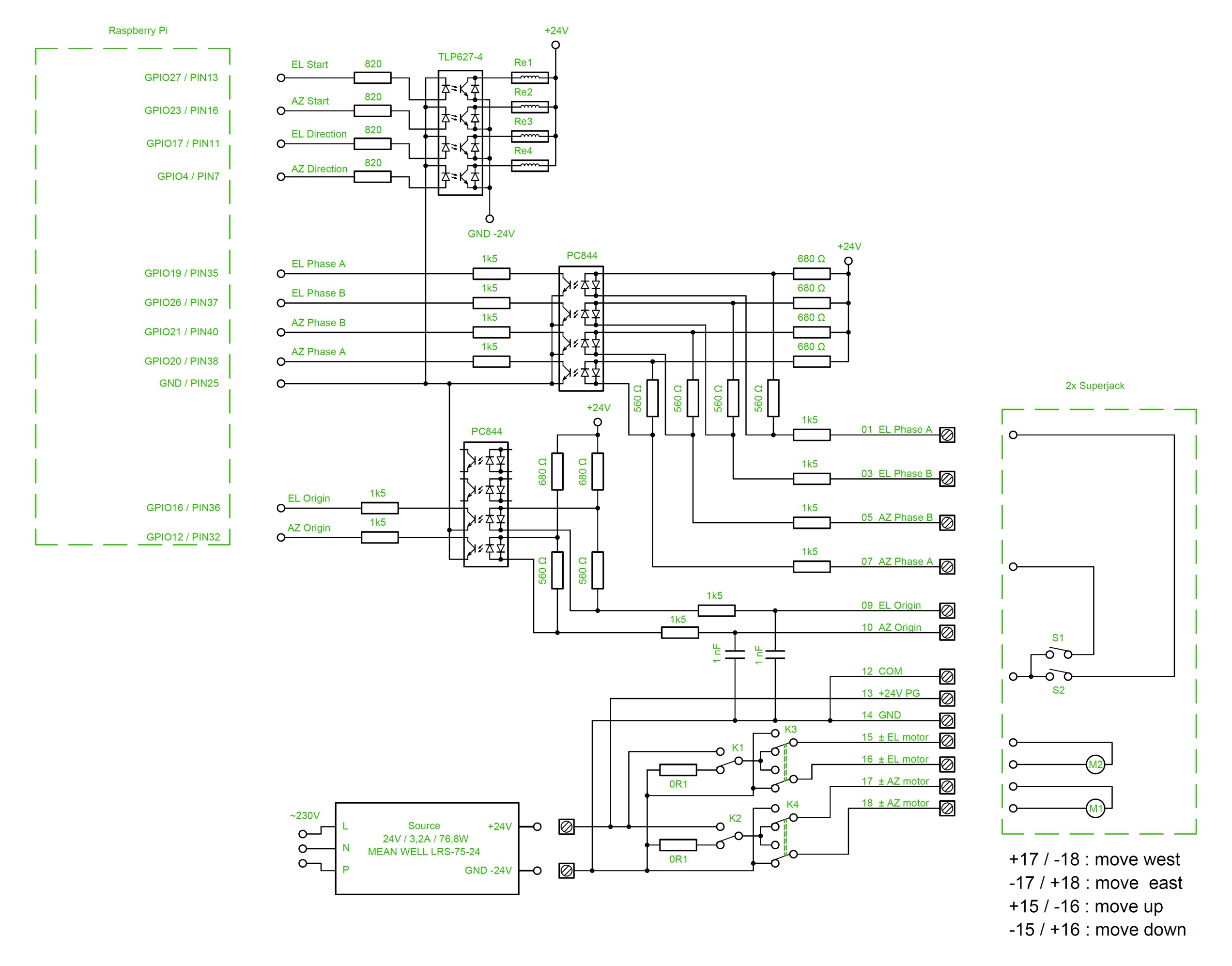
Obr. 1 - HW 1.0 Zkušební připojení 2x Superjack
Protože snímače otáček u táhlových motorů jsou jen mechanický spínač ovládaný magnetem, bylo by vhodné na vstupní svorky doplnit filtrační kondenzátory, jako jsou na vstupech svorek 09 a 10 - Origin.
Největším problémem by mohlo být napájecí napětí motorů. Táhlové motory se sice vyrábějí i pro napětí 24V, myslím si ale, že v České republice jsou nejvíce používány varianty s napájením 36V. Ale to by pro první pokusy nemuselo vadit. Motory se nejspíš budou jen otáčet o něco pomaleji a budou mít menší sílu. Pro paraboly menších rozměrů by to mohlo fungovat. Komu by to nestačilo, musel by použít zdroj 36V a relé s cívkou na 36V. Například spínaný zdroj MEAN WELL LRS-100-36. S relé to už vypadá hůř, tady pro 36V není tak velký výběr. Ale šlo by použít třeba 6x SRD-36VDC-SL-C. Otázkou je, jestli by při zvýšení napětí o 12V bylo potřeba překonfigurovat i vstupní odporovou síť, aby nebyly přetížené vstupní LED diody v optočlenech.
Podobné to bude i s ovládacím programem. Pro první pokusy s drobným omezením by měl být použitelný bez jakýchkoliv úprav. Základní princip činnosti je stejný. Vyhledání pozice na základě počítání impulzů z čidel. Rozdíl mezi EGISem a táhlovým motorem je pouze v detekci výchozího - nulového bodu. EGIS na to má speciální spínač Origin, jehož testováním pozná výchozí polohu. Táhlové motory takový spínač nemají. Mají koncové bezpečnostní spínače, přes které teče hlavní napájecí proud do motoru. Tyto spínače nejsou vyvedeny ven z táhlového motoru a dosažení výchozí pozice se pozná jen tak, že do zařízení přestanou přicházet impulzy ze snímače otáček.
To v praxi znamená, že nebudou použitelné žádné funkce vyžadující detekci nulového bodu. Vše ostatní by ale mělo fungovat. Tedy čtyři tlačítka pro manuální ovládání pohybu vlevo, vpravo, nahoru a dolu. Po nalezení družice uložení stavu počítadel impulzů do předvoleb. A po naplnění předvoleb už bude fungovat automatické přenastavení na vybranou předvolbu / družici.
Mě tahle možnost, kterou jsem dopředu neplánoval a nepřipravoval, vysloveně nadchla.